Ghostriderrobot
The Blue Team is developming cutting edge technology to solve difficult problems in robot navigation using inovative approaches. Below is a small sample of the technology we are building.
| DARPA E-stop Interface Board
Used to comply with DGC rules 
|
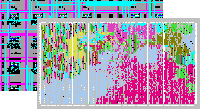
Sensor Hub
We created a real-time "live database" of all sensor values. By having all the sensor data available from one single source we can simplify our system architecture. Sensor interfacing is done on ethernet links over UDP. Thanks Alex! Below is an image of what the FPGA design looks like on the fabrication level:
|
| Gimbal
Used to eliminate road noise and point sensor in proper direction. 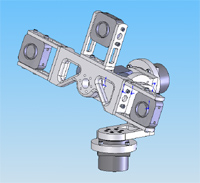
By interfacing to a Crossbow gyro for current roll, pitch and yaw angle orientation of ghostrider we can correct for errors. Enabling us to point our sensors in any direction we want. |
Realtime Motorcycle Stability
Used to for prototyping and testing high end motorcycles. 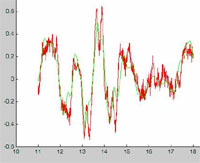
The understanding of the fundemental of motorcycle stability is helping making the most exiting vehicles faster, safer and cheaper. An autonomous motorcycle can be used in the precise repetition of component testing such as suspension without the need for a test driver. |